2025.8.07
Lab-STICC(CNRSに所属する公的研究機関)
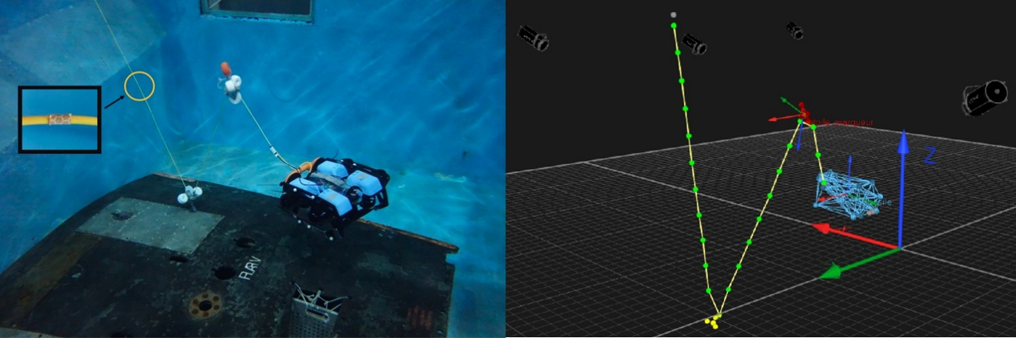
遠隔操作型無人潜水機(ROV)のアンビリカルケーブル※1は、リアルタイムでの情報伝送やロボットへのエネルギー供給を可能とします。一方で、ケーブルが絡まる・形状の予測が難しいなど多くの欠点があり、アンビリカルケーブル無しでも運用できないかと議論されています。これらの制約を利点に変えるため、アンビリカルケーブルの形状の観察を通してROVの位置を推定する方法を提案します※2。アンビリカルケーブルに可動バラストとブイを装備することで、直線且つ予測可能な形状に変形させることができます、モーターやTMSも不要でセットアップも簡単です。このようにして、アンビリカルケーブルの簡単な数学モデルを定義することができます。これらのモデルを用いてケーブル端の角度を測定すると、ROVの位置を特定することが可能です。
上記方法を用いて、プールを用いたROVの推定位置と実際の位置の比較試験を行いました。アンビリカルケーブルには、反射テープが20cm毎に貼付されており、Qualisysモーションキャプチャシステムを用いてマーカーをトラッキングします。5台のMiqusUWカメラで構成された水中モーショントラッキングシステムは、ROVの動作に応じて変動するアンビリカルケーブルのマーカー位置を3Dトラッキングします。MiqusUWカメラの内4台はタンクの端に固定、1台はプール底にそれぞれ配置されました。トラッキングデータはQualisys Track Managerソフトウェアで処理、各マーカーの3D位置情報が算出されます。貼付されたマーカーの厚みは、スライドする物体の動きに影響を与えないほど薄い為、アンビリカルケーブルの形状を理論モデルと比較することが可能です。
アンビリカルケーブルの成す角度は、特定の構成での比較のために、Qualisysシステムと実際のIMUを用いてそれぞれ測定されました。結果、アンビリカルケーブル・3mの場合、Qualisysシステムにより検出された位置誤差は10cm、IMUにおいては25cmでした。従って、アンビリカルケーブルの角度測定に基づく水中ROVの位置推定方法は、十分運用に適していると考えられます。
当プロジェクトの詳細は[1]に掲載されています。Qualisysは[2]負浮力ケーブルの懸垂線の形状測定にも使用されています。
[1] ROV localization based on umbilical angle measurement C Viel, J Drupt, C Dune, V Hugel – Ocean Engineering, 2023 https://doi.org/10.1016/j.oceaneng.2022.113570
[2] Inertial-measurement-based catenary shape estimation of underwater cables for tethered robots J Drupt, C Dune, AI Comport, S Seillier – – 2022 IEEE/RSJ https://doi.org/10.1109/IROS47612.2022.9981980
※1:無人潜水機に電源や信号を供給する電線
※2:Qualisys File Libraryでは、装備内容が異なる、3種類のアンビリカルケーブルモデルが提案・公開されています。
