モーションキャプチャー・・・「人」や「物」の「動き」を数値化するシステム
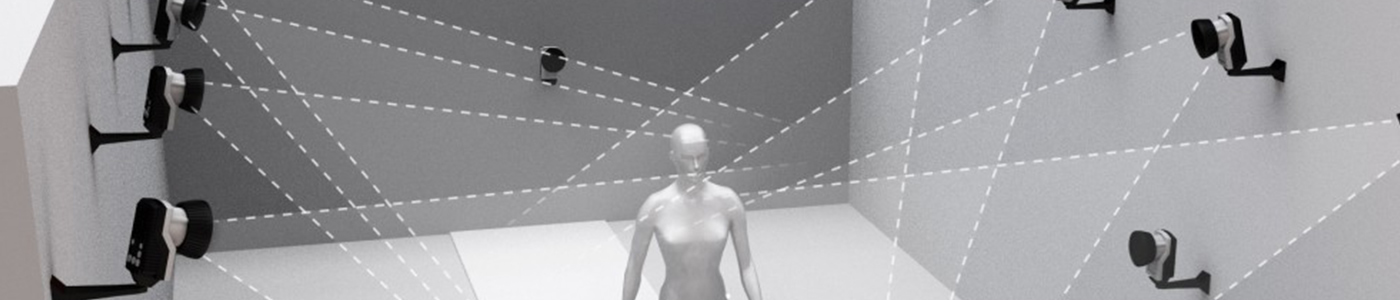
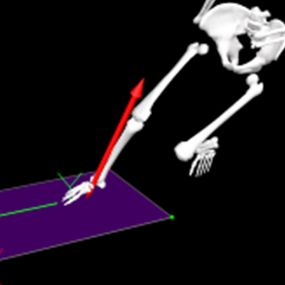
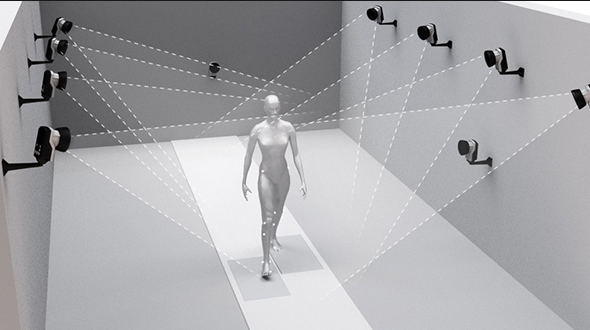
各モーションカメラから照射される光は計測ターゲットに装着した【反射マーカー】により再帰性反射し戻ってきます。その戻ってきた光を撮影することで 反射ポイントのx,y座標を各モーションカメラが算出します。 各モーションカメラはキャリブレーションによりカメラ画角内の座標位置情報を共有しておりますので、各カメラで算出したx,y座標を元に2台以上のカメラ情報を統合する事で奥行きz情報を計算し3次元座標を算出します。 モーションキャプチャーシステムはハイスピードカメラによる動作解析とは違い、光が反射したポイントのみを撮影/計算している為データ量が軽くリアルタイム性に優れております。また、座標位置精度(x,y,z,6DOF)もサブミリ以下で算出しており計測対象が【人物】【物体】問わず幅広くご使用可能です。
カメラセッテング STEP.1 Camera setting
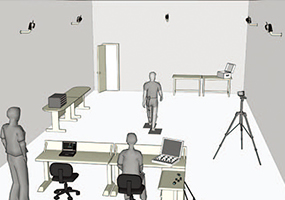
市販されている三脚などにモーションカメラを取り付けてカメラを配置します。
通常は計測対象物の移動範囲を囲むようにカメラを配置します。 Qualisysはデイジーチェーン方式により簡単にカメラ設置が可能です。




ダイナミックキャリブレーション STEP.2 Dynamic calibration
計測予想範囲の中心にL字原点キットを置き、T字空間補正キットを空中で動かす事で角カメラがL字の原点を認識し空間内の座標位置情報を共有します。
Qualisysは一回の工程でキャリブレーション完了です。


反射マーカー装着 STEP.3 Reflective marker fitted
計測対象物に反射マーカーを装着し計測の準備をします。
Qualisysは通常の反射マーカーはもちろんテープ式やアクティブマーカー/クラスターなど様々な種類のご用意があります。




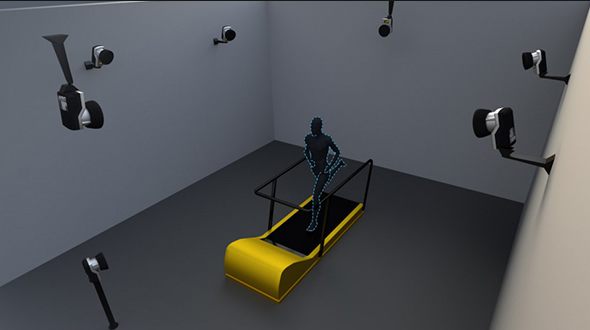
計測スタート・観察・解析 STEP.4 Measurement start/Observation/Analysis
計測中はリアルタイムに3次元位置データを観察できます。
ステップ1からステップ4までの工程全ての操作を日本語対応ソフトウェアQualisys Track Mangerで行います。


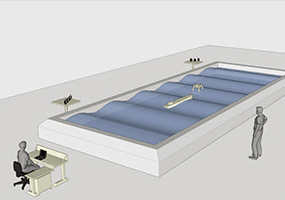
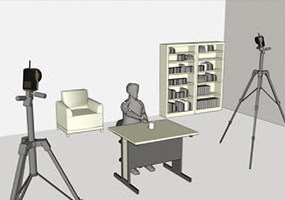
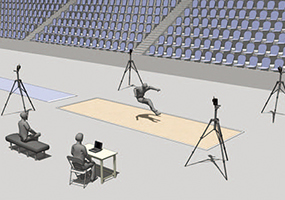
CAMERA ARRANGEMENT SIMULATION カメラ配置シュミレーション(Miqus) +
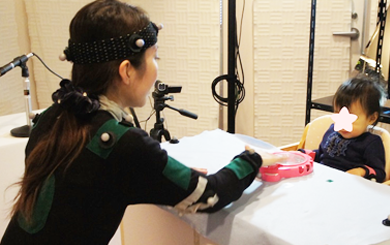
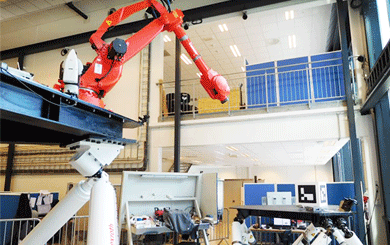
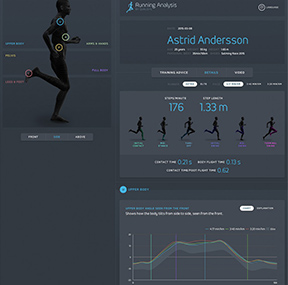
APPLICATION EXAMPLE アプリケーション使用例 +
USER CASE ユーザ事例 +